Обезьян научили управлять искусственной рукой при помощи мозговых импульсов
Две обезьяны с вживленными в мозг электродами научились управлять механической рукой, имеющей 5 степеней свободы, одной лишь «силой мысли». Успех эксперимента был обеспечен оригинальной методикой обучения, в ходе которого контроль над искусственной рукой постепенно переходил от компьютерного «автопилота» к обезьяне. При этом «обучалось» не только животное, но и программа, интерпретирующая мозговые импульсы и преобразующая их в движения механической руки.
Разработка протезов, которыми человек мог бы управлять точно так же, как настоящими конечностями, — при помощи мозговых импульсов — является одной из актуальных задач медицины. В последнее время в этой области исследований наблюдается значительный прогресс. И обезьяны, и люди уже могут мысленно управлять движением курсора на экране компьютера (см.: В компьютерную игру можно играть силой мысли). Но управлять курсором намного проще, чем пользоваться таким сложным устройством, как рука, в настоящем трехмерном пространстве.
Группа американских нейробиологов, медиков и робототехников сообщила в последнем номере журнала Nature о сенсационном результате: им удалось научить двух макаков резусов брать пищу и отправлять ее в рот при помощи механической руки с «мысленным» управлением.
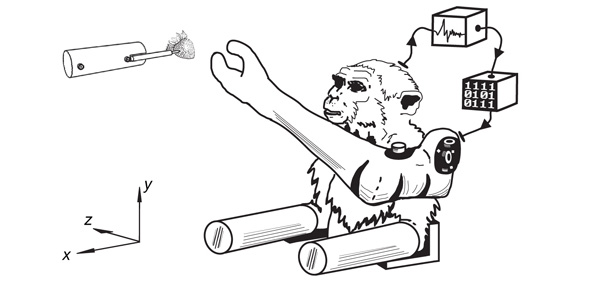
В экспериментах использовалась искусственная рука, по своим механическим характеристикам близкая к настоящей. У нее пять степеней свободы: она может двигаться в плечевом суставе вверх-вниз, вправо-влево и вращаться вокруг своей оси (три степени свободы), в локтевом суставе она может только сгибаться-разгибаться (четвертая степень свободы); кроме того, она снабжена хватающей «кистью» в виде клешни, которая может сжиматься и разжиматься (пятая степень свободы). Все движения осуществляются при помощи моторчиков с компьютерным управлением.
Ученые вживили двум макакам по 96 электродов в участок первичной моторной коры (Primary motor cortex), управляющий движениями плеча и предплечья. Эти электроды у двух обезьян были немного по-разному распределены (подробности см. в дополнительных материалах к статье). Попадание электродов в те или иные конкретные точки коры было в значительной мере случайным, и уж во всяком случае никто не мог знать заранее, какие из электродов будут воспринимать мозговые команды, скажем, о подъеме руки, а какие — о сгибании локтя. Это предстояло выяснить в ходе дальнейших экспериментов. Долгий курс обучения должны были пройти не только обезьяны, но и компьютерная программа, в задачи которой входила интерпретация мозговых сигналов и преобразование их в команды, управляющие движениями механической руки.
На начальном этапе обезьян учили управлять искусственной рукой при помощи джойстика с кнопкой (кнопка предназначалась для открывания и закрывания клешни); кроме того, обезьяны просто смотрели на автоматические движения руки, которая брала пищу из разных мест и подносила ее ко рту обезьяны (известно, что вкусная пища — чуть ли не единственный стимул, побуждающий обезьяну в лабораторных условиях быть внимательной и чему-то учиться). Пока механическая рука двигалась, а обезьяна на нее смотрела, компьютер регистрировал сигналы, поступающие от 96 электродов, и подвергал их сложной статистической обработке. Сигналы от некоторых датчиков не коррелировали с движениями руки, и эти датчики впоследствии не учитывались. Для остальных электродов компьютер определял, какие движения искусственной руки сопровождаются наиболее сильными нервными импульсами. Так были выявлены электроды (и соответствующие точки мозга), которые избирательно реагируют на те или иные движения (вверх-вниз, вперед-назад и вправо-влево), а также на сжимание и разжимание пальцев. Соответствующий «рисунок» возбуждения нейронов интерпретировался как команда, посылаемая мозгом. Например, если данные 10 датчиков регистрировали наиболее сильные сигналы при подъеме руки, то в дальнейшем, когда управление рукой передавали обезьяне, сигналы от этих 10 датчиков компьютер преобразовывал в команду «поднять руку».
После этого этапа предварительного обучения исследователи попытались сразу передать обезьянам всю власть над механической рукой, но ничего не вышло: обезьяны не справилась с управлением. Тогда пришлось пойти более долгим путем постепенной передачи контроля от «автопилота» обезьяне. При этом училась не только обезьяна, но и компьютер: интерпретация нервных импульсов постоянно уточнялась и «подстраивалась» к текущему состоянию обезьяньего мозга. Как выяснилось, такая подстройка должна осуществляться ежедневно, потому что компьютерная интерпретация мозговых сигналов, рассчитанная на основе вчерашних экспериментов, сегодня может для той же самой обезьяны оказаться недостаточно точной. Кроме того, импульсы, генерируемые мозгом во время пассивного наблюдения за автоматически движущейся рукой, оказались не совсем идентичными тем, что генерируются при непосредственном «мысленном» управлении искусственной конечностью.
Задача, которую обезьяна должна была выполнить при помощи искусственной руки, изо дня в день была одна и та же: нужно было взять пищу (пастилу или ягоду), которая появлялась в разных местах в пределах досягаемости, и поднести ее ко рту (а потом, разумеется, съесть, но это уже делалось без помощи технических средств). Самая трудная часть задания состояла в том, чтобы поднести раскрытую клешню точно к пище. Для этого нужно было управлять рукой с точностью до нескольких миллиметров, иначе еду не удастся схватить. Подносить пищу ко рту можно было с меньшей точностью, поскольку обезьяна могла шевелить головой (ее руки — настоящие, а не искусственные — были закреплены в специальных трубках).
В течение нескольких недель контроль над искусственной рукой постепенно передавался от «автопилота» обезьяне. Помощь «автопилота», упрощенно говоря, состояла в том, что обезьяне было легче совершать «правильные» движения, чем «неправильные» — искусственная рука охотнее двигалась в нужном направлении, чем в любом другом. Постепенно эта помощь слабела. С точки зрения обезьяны это означало, что задача становилась всё более трудной, так что ей приходилось каждый день продолжать учиться, постепенно совершенствуя мастерство владения искусственной рукой.
Наконец автопилот был полностью отключен, и обезьяны стали совершенно самостоятельно кормить себя при помощи механической руки, управляемой мозгом. Нельзя сказать, что это получалось у них так же ловко, как настоящими руками, но всё же в большинстве случаев пища была успешно схвачена и доставлена ко рту (см. видео в дополнительных материалах к статье).
Авторы отмечают, что обезьяны не просто выучили серию механически повторяющихся «ментальных» действий, а освоили настоящее сознательное управление искусственной конечностью. Это подтверждается несколькими фактами. Во-первых, положение пищи всё время менялось, так что тянуть искусственную руку нужно было в разные стороны.
Во-вторых, ученые провели дополнительный опыт, в котором пища была внезапно передвинута в тот момент, когда обезьяна уже поднесла к ней свою клешню. Если бы обезьяна теперь направила клешню к лакомству по прямой линии, угощение было бы сбито с подставки. Нужно было переместить конечность по дуговой траектории, и обезьяна отлично с этим справилась.
В-третьих, в ходе экспериментов обезьяны освоили ряд новых движений, которым их никто не учил. Например, если во время поднесения пищи ко рту лакомство падало, обезьяны не продолжали двигать ко рту пустую клешню, а останавливали ее в ожидании следующей порции. Они также научились совершать клешней небольшие движения около рта, чтобы удобнее было ее облизывать, и не тянули руку к новой порции пищи до тех пор, пока не оближут хорошенько. Сначала они держали клешню закрытой в течение всего времени переноса пищи ко рту, но потом заметили, что пастила прилипает к клешне и обычно не падает, даже если клешню разжать. Тогда они стали разжимать клешню не у самого рта, а еще в пути.
Идеи и методы, придуманные авторами, должны помочь медикам и инженерам в разработке протезов нового поколения с «мысленным» управлением.
Источник: Meel Velliste, Sagi Perel, M. Chance Spalding, Andrew S. Whitford, Andrew B. Schwartz. Cortical control of a prosthetic arm for self-feeding // Nature. Advance online publication 28 May 2008 (doi:10.1038/nature06996).
-
Очень интересное сообщение.
В настоящее время исследуется, по крайней мере, два механизма подключения к мозгу. Во-первых, путём имплантации искусственных портов, во-вторых, за счёт мутации существующих, но не развитых элементов организма. Менее перспективным считается поиск бесконтактной и скоростной технологии обмена с существующими органами.
Кроме того, сегодня имплантация тканей и органов, в том числе с применением искусственных элементов (сосудов, клапанов, стимуляторов), является лишь прологом к сближению медицины и образования. Интеграция человека с "машинами" здесь является истоком новых технологий. Пока всё это плохо прилажено друг к другу, в тысячу раз чаще торжествует реакция отторжения. Более выверенная стыковка на молекулярном уровне позволит восполнять утраченные и дополнять отсутствующие способности человека.
И лечение, и загрузка знаний должны стать промышленными технологиями, окончательно выйти из плена и тени любых предрассудков.-
Мне кажется,что вы сильно форсируете."Загружать" знания в мозг - это вовсе не тот же процесс,что и загрузка операционной системы с жесткого диска.Пока еще досконально неизвестен механизм памяти и уж совершенно неизвестен механизм использования приобретенных навыков....так что не ждите,что завтра вам предложат вживление разьема USB.
-
Отмахиваться от будущего не следует.
Испытания в области имплантации портов - реальность. Согласитесь, ведь есть определённые успехи по созданию бионического глаза.
И потом, к сожалению, на Земле так много инвалидов, нуждающихся даже в элементарной компенсации, что будут использоваться и несовершенные устройства.
Ещё, я считаю, загружать непосредственно в мозг больше чем сейчас не следует, по крайней мере, в такой мозг, какой есть. Скорее нужен мозг с открытой памятью, с внешним ПЗУ, с возможностью подключения к коммуникаторам, к сетям и т.д.
Ускорить процесс загрузки гораздо важнее, чем увеличить объём информации.-
Вот опять Вы перепутали божий дар с яичницей......Вы никак не хотите понять,что в данном случае процесс односторонен.Если СЧИТАТЬ с мозга в данном эксперименте худо-бедно удалось (после обучения и, признаюсь,революционной методики)то ЗАПИСАТЬ данные, и уж тем более навыки в мозг невозможно без понимания механизмов функционирования как мозга в общем,так и механизмов памяти и механизмов навыков в частности...
-
Приспособление организма к любому имплантанту или протезу, даже к нейтральному косметическому силикону, затрагивает память. Другое дело, что и в простых, и в сложных случаях адаптации используются стандартные алгоритмы памяти и механизмы мозга. А медикаментозно или воздействием полей, излучений мы можем лишь улучшить (облегчить, ускорить) природные процессы или замедлить их. Таким образом, действительно остаётся недоступной принципиальная модификация на клеточном и молекулярном уровне. Однако полагаю, что такая глубокая ревизия мозга пока не требуется, просто это будет следующим этапом исследований, на современном этапе мы учимся подключать к мозгу внешние устройства, в том числе порты обмена данными.
В случае успешного развития этой технологии во всех видах обучения можно будет использовать внешнюю память, не травмируя мозг.
По поводу технологии выращивания тканей и органов, думаю, никто не сомневается, что 'живая рука лучше протеза'. Тут точно встречаются две конкурирующие технологии, но эти технологии относятся, по сути, к производству протезов (имплантантов) и к технологии самой имплантации. Вопросы вмешательства в нервную деятельность обе эти технологии затрагивают на стадии реализации.-
Попытка впечатляющая,но неудачная.Да,удалось подключить внешнее устройство к мозгу.Да,удалось создать драйвер и контроллер.Удалось ли раскрыть механизм памяти? Нет. Механизм навыков? Нет. В последнее время появились гипотезы,что память представляет собой "голограмму",записанную на всей нейронной сети.Напомню,что отломив от фотопластинки,несущую голограмму,кусочек,мы получим ту же голограмму,только несколько потускневшую.Это означает,что любой фрагмент фотопластинки несет информацию о ВСЕЙ голограмме.
Мне представляется, что техническая реализация в таком случае будет проблематичной.Чтобы создать наведенную голограмму в мозгу,требуется "подключиться" к каждому синапсу.Сколько их,этих синапсов? Какой обьем информации потребует такая ментограмма? Ответив на эти два вопроса, Вы сможете оценить сложность технического воплощения.
Хочу напомнить,что гипотеза о голографичности памяти пока остается гипотезой.Пока механизм памяти (и навыков) не раскрыт,неразумно рассуждать об услугах вживления в череп разьема USB))))))))))))-
Вы правы, что подключиться ко всем функциональным контактам не реально. Однако этого и не требуется. Наблюдая (как технарь) за больными в медицинском институте и в военном госпитале, я сам с удивлением замечал, что нервная система через несколько месяцев после операции управляется с неестественными для организма 'крючками' скверных протезов. Повторю ранее высказанное мнение, что у мозга человека и животных имеется способность приспосабливаться к ограниченному числу контактов. Это же доказывают и опыты с бионическим глазом, и опыты с манипулятором из представленной статьи.
-
Вы тоже правы в том,что нервная система обладает гиганской пластичностью.Например,природа не создала ни велосипед,ни автомобиль,ни самолет.Тем не менее,раз научившись ездить на велосипеде,мы в дальнейшем едем автоматически,совершенно не задумываясь о процессах,которые происходят.Эта "простота",вероятно и вызвала у вас иллюзию простоты реализации "пректа наведенной памяти".На самом деле это не так.Вспомните,сколько времени понадобилось инженерам,чтобы "научить" роботов элементарной ходьбе в стиле человека,на двух ногах. Робот,который ездил бы на велосипеде,так до сих пор и не создан.А уж ходящего робота,которого можно НАУЧИТЬ ездить на велосипеде,так же,как учат людей....Ваш покорный слуга знаком с принципами синтеза автоматических систем управления....у меня волосы на затылке шевелятся,едва я представляю себе примерный объем программы управления для такой системы....да еще чтобы работала в реальном режиме времени....
-
-
-
-
-
-
-


Теперь по существу. Несмотря на сенсационный результат, мне кажется, что эта технология уступит все-таки пальму первенства технологии выращивания органов из стволовых клеток. Согласитесь, настоящая живая (пусть искусственная) рука все-таки лучше механического протеза (даже если не брать в расчет эстетические,моральные,религиозные и др.соображения) поскольку не требует внешнего источника питания,самовостанавливается при травмах, не нуждается в техническом обслуживании,а кроме того,обладает осязанием и чувстом позиционирования,чего искусственная рука лишена.Попробуйте с закрытыми глазами коснуться пальцем кончика носа - и вы меня поймете.
Описанная технология может пригодиться уж в очень экзотических случаях.Воображение подсказывает дистанционный штурм поверхности Венеры или толщи атмосфер газовых гигантов,куда путь человеческому организму заказан.Список можете продолжить сами.
Последние новости









