Быстрый старт
Задача
В учебниках по кинематике — как школьных, так и университетских — зачастую ограничиваются рассмотрением движения тел с постоянным ускорением (помимо, конечно же, тривиального случая, когда тело движется с нулевым ускорением и постоянной скоростью). Обычно этого хватает — для многих ситуаций такого приближения достаточно. К примеру, свободно падающее тело (без сопротивления воздуха) действительно движется с постоянным ускорением.
Но во многих физических системах этим приближением пользоваться нельзя, и если попытаться описать движение тел в них как равноускоренное, то ничего хорошего не выйдет. Примерами таких систем служат разгоняющиеся машины и поезда или движение частей тела и животных. Во всех этих системах сила обусловлена не идеальной гравитацией, а некоторыми процессами, в которых энергия конвертируется из одной формы в другую. Эти процессы не способны обеспечить постоянную силу (а, следовательно, и ускорение), но способны выдавать постоянную мощность, то есть расход энергии (и выполняемая полезная работа) в единицу времени остается постоянным в течение какого-то промежутка времени.
Таким образом, поведение таких систем с внутренним источником энергии лучше описывается уравнениями движения при постоянной мощности.
а) Рассмотрим тело в состоянии покоя, которое начинает движение, характеризующееся постоянной мощностью \(P=const\). Найдите зависимость скорости \(v\) и ускорения \(a\) этого тела от времени \(t\).
Применимы ли выведенные уравнения в момент начала движения?
б) Рассмотрим конкретный пример: машина стартует с места и начинает разгоняться. Для простоты допустим, что со стороны мотора на оси колес передается некоторая постоянная мощность. Что будет происходить с этой машиной в момент нажатия на педаль газа? Как описывается движение машины в этот момент?
в) За какое время машина массой 1,5 тонны с двигателем мощностью 100 лошадиных сил сможет разогнаться до 100 км/ч, если максимальная сила трения со стороны асфальта равна \(\approx 0{,}3mg\)? Успеет ли она разогнаться до 100 км/ч на первых ста метрах дороги? На что прежде всего стоит обратить внимание инженерам, проектирующим специальные машины, которые должны разгоняться до 100 км/ч за минимальное время? Насколько важны вес машины и мощность двигателя? За какое минимальное время такая машина способна в принципе разогнаться до 100 км/ч?
Подсказка 1
При выводе уравнений движения при постоянной мощности можно воспользоваться вторым законом Ньютона, который по-прежнему применим. Подумайте, какую работу совершает тело, и на что тратится эта работа.
Подсказка 2
Максимальная сила, с которой машина может «оттолкнуться» от дороги, определяется максимальной силой трения шин о ее поверхность. Поэтому в первый момент времени движение машины не может описываться уравнениями движения с постоянной мощностью.
Решение
Сначала выведем уравнения движения. При движении с постоянной мощностью \(P\) сила, действующая на тело, равна \(F=P/v\). Это позволяет выразить ускорение тела из второго закона Ньютона (который гласит, что \(a=F/m\)):
\[a = \frac{P}{m v}.\]Ускорение обратно пропорционально скорости тела (ведь отношение \(P/m\) постоянно). Уже здесь видна проблема: из этого уравнения следует, что при нулевой скорости для движения с постоянной мощностью требуется бесконечно большая сила.
Теперь найдем зависимость скорости и ускорения от времени. Работа, совершаемая двигателем, работающим с постоянной мощностью, за время \(t\) равна \(W=Pt\), и эта работа конвертируется в кинетическую энергию тела \(mv^2 / 2\) (если тело стартует с места, то начальная энергия равна нулю). Значит, зависимость скорости от времени выглядит так:
\[v = \sqrt{\frac{2Pt}{m}}.\]Подставив это выражение в первое уравнение, найдем и зависимость ускорения от времени:
\[ a = \sqrt{\frac{P}{2mt}}.\]Заметим, что скорость от времени зависит как \(v\propto \sqrt{t}\), тогда как при постоянном ускорении \(v\propto t\). И снова обратим внимание на то, что в момент \(t=0\) (когда тело покоится) выражение для ускорения не совсем корректно. Наши уравнения предсказывают бесконечные ускорения, а, следовательно, и бесконечные значения силы. Это означает, что в момент начала движения предположение о том, что оно происходит при постоянной мощности, не работает.
В идеальной ситуации на машину со стороны дороги действовала бы бесконечно большая сила. Однако в реальности сила, которая действует со стороны дороги на машину и заставляет ее ускоряться, ограничена силой трения (скольжения) между резиной шин и поверхностью дороги. Сила, с которой поверхность дороги «толкает» машину, не может превышать величины \(F_{\mathrm тр} = k\mu m g\), где \(mg\) — это вес машины, \(\mu\) — коэффициент трения, а \(k\) — некоторое близкое к 1 число, которое зависит от распределения веса машины относительно ведущих колес (\(k=1\) примерно соответствует полноприводной машине).
В реальности движение машины поначалу описывается как движение при постоянной силе, равной максимальной силе трения, и только затем переходит в режим движения с постоянной мощностью, — когда ускорение и, следовательно, сила станут меньше, чем максимальная сила трения скольжения шин. Графики зависимости ускорения и скорости от времени при таком движении показаны на рис. 1.
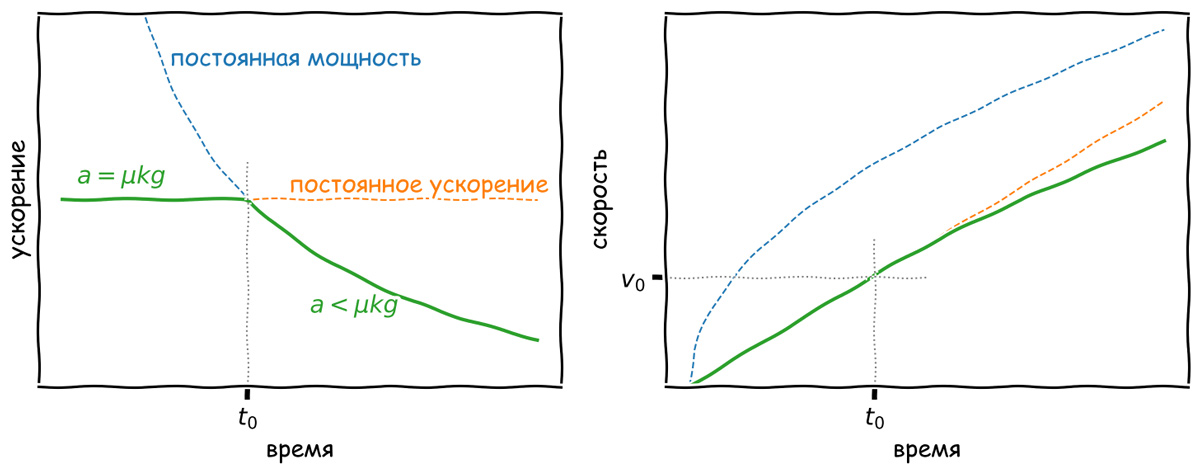
После старта машина движется с постоянным ускорением \(a=k\mu g\), определяемым максимальным сцеплением шин. В некоторый момент \(t=t_0\) скорость машины становится достаточно большой, чтобы шины перестали проскальзывать (в этот момент сила \( k \mu m g = P/v_0\)), и дальнейшее движение происходит при постоянной мощности с ускорением, обратно пропорциональным корню из времени (\(a\propto 1/\sqrt{t}\)), как было показано выше.
Таким образом, процесс разгона машины состоит из двух частей: движения с постоянным ускорением до момента \(t_0\) и движения с постоянной мощностью после этого. Машина весом 1,5 тонны с мощностью двигателя 100 л. с. (что соответствует 74,5 кВт) и максимальным коэффициентом сцепления \(k\mu\approx 0{,}3\), стартующая с места, разгонится до скорости 60 км/ч (17 м/с) за 5,75 секунд (момент \(t_0\) на графиках), двигаясь с постоянным ускорением \( k \mu g\):
\[t_0=\frac{P/m}{(\mu kg)^2},~~~v_0=\mu k g t_0.\]В этот момент скорость машины станет достаточной, чтобы она перешла в режим движения с постоянной мощностью. В итоге, время, которое нужно машине для разгона до некоторой скорости \(V\) можно найти следующим образом:
\[\Delta t_{V}=t_0 + t_{0\to V}-t_{0\to v_0},\]где \(t_{0\to V}\) и \(t_{0\to v_0}\) — времена, за которые машина набирает, соответственно, скорость \(V\) и \(v_0\), стартуя с места и двигаясь все время в режиме постоянной мощности. Эти времена легко найти из выведенных выше соотношений:
\[t_{0\to v_0} = \frac{v_0^2}{2P/m},~~~t_{0\to V}=\frac{V^2}{2P/m}.\]Отсюда найдем, что полное время разгона равно
\[\Delta t_{V} = \frac{V^2}{2P/m}+\frac{P/m}{2(\mu k g)^2}.\]Для машины из условия это значение близко к 10,7 секундам. Первая часть уравнения — это оценка при движении с постоянной мощностью, вторая — это поправка, которая возникает из-за скольжения шин. Следует, конечно помнить, что эта формула действительна, лишь когда \(t_0\) меньше \(\Delta t_V\) (или, что то же самое, когда \(v_0 < V\)), иначе машина все время будет двигаться с постоянным ускорением, так и не достигнув скорости перехода \(v_0\). Зависимость скорости от времени для нашей машины выглядит так, как показано на рис. 2.

Рис. 2.
Расстояние, которое потребуется машине на разгон до 100 км/ч, вычисляется как площадь под этим графиком. Для точного расчета нужно брать интеграл, но достаточно хорошую оценку можно получить проще, например, приблизив график треугольником и трапецией. Получается, что машина за эти 10,7 секунд проезжает почти 160 метров, то есть 100-метрового участка ей явно недостаточно.
Послесловие
Заметим важную и очевидную особенность: в плане производительности имеет смысл лишь отношение \(P/m\). Если, например, увеличить мощность двигателя вдвое, но при этом вдвое увеличить и массу машины, никакой разницы не будет.
Посмотрим, как время \(\Delta t_V\) зависит от отношения \(P/m\). Для простоты зафиксируем массу и будем менять лишь мощность двигателя. На рис. 3 показаны графики этой зависимости для четырех значений коэффициента \(\mu k\).

Рис. 3.
Довольно явные «переломы» у синей и оранжевой кривых происходят при предельной мощность, после которой скорость перехода \(v_0 > 100~\text{км/ч}\). Несмотря на то, что эти графики иллюстрируют крайне идеализированную картину, из них можно сделать три важных вывода.
Во-первых, самый важный показатель, от которого зависит, насколько быстро машина разгоняется до определенной скорости, — это максимальное трение! При значении коэффициента «сцепления» \(\mu k = 0{,}6\) разгон до 100 км/ч происходит более чем вдвое быстрее, чем при \(\mu k = 0{,}3\) на той же машине. При этом, строго говоря, \(\mu k = 1\) — это не предел. Дело в том, что на машину помимо силы тяжести действуют и аэродинамические силы. Если их правильно использовать, то максимальная сила сцепления может быть больше. Этим, собственно, и пользуются конструкторы гоночных машин. Например, действующая на болиды современной Формулы-1 прижимная сила при больших скоростях более чем в три раза превосходит их вес. О том, как этого добиваются, можно прочитать в этой статье. А в этом видеоролике специалист по аэродинамике и технический директор команды «Мерседес» Майк Эллиот (Mike Elliot) разбирает вопрос о том, может ли болид Формулы-1 ездить по потолку.
Во-вторых, заметим, что мощность машины важна лишь до какого-то оптимального значения. К примеру, для \(\mu k = 0{,}3\) это значение близко к 150 л. с. Если мощность увеличить, то машина все равно не сможет разгоняться заметно быстрее. На самом деле, конечно же, механика машины устроена гораздо сложнее, и двигатели с большей мощностью способны давать другие преимущества. Однако из графика уже можно сделать грубый вывод, что, если максимальное сцепление \(\mu k = 0{,}3\), то с точки зрения динамики разгона нет никакого смысла иметь двигатель мощнее 150 л. с.
В-третьих, можно увидеть, что машина с массой 1500 кг даже теоретически не может разогнаться до 100 км/ч быстрее, чем за 2–2,5 секунды. И даже чтобы достичь такой производительности, вам потребуется очень хорошее сцепление с дорогой (\(\mu k\approx 1\) или даже лучше) и двигатель с мощностью 500 л. с. или даже выше. Рекорды современных серийных спорткаров близки к этому времени.
Для болидов Формулы-1 картина не сильно отличается. Мощность их двигателей лежит в диапазоне 800–900 л. с., а масса (с водителем) составляет 700–750 кг. Если предположить, что из-за аэродинамики (которая при низких скоростях не слишком эффективна) на машину действует максимальная сила со стороны дороги \(1{,}5 mg\), то получим, что минимальное время разгона до 100 км/ч составляет 1,6–1,7 секунд (что примерно совпадает с нынешним рекордом машин Ф-1). При этом водитель будет испытывать ускорение почти вдвое больше нормального, что, впрочем, не проблема для опытных пилотов.

Рис. 4.
Законы движения при постоянной мощности довольно просто объяснены в статьях L. W.Taylor, 1930. The Laws of Motion Under Constant Power и R. Stephenson, 1982. Constant power equations of motion, которые использовались при подготовке этой задачи. В качестве упражнения, которое продемонстрирует силу этого приближения при описании некоторых физических явлений, оцените максимальную скорость, с которой в американском футболе квотербэк способен кинуть мяч. Можно считать, что мощность, развиваемая руками атлета, составляет примерно 20 ватт на кг (для обычного человека это значение примерно вдвое меньше). Вам пригодится формула, выражающая расстояние, пройденное в режиме постоянной мощности при развитии скорости \(v\): \(s=mv^3/(3P)\) (ее вывод приведен в статье L. W.Taylor, 1930. The Laws of Motion Under Constant Power).



Рис. 1.