Бифуркация и катастрофа
Задача
В этой задаче предлагается рассмотреть две абсолютно разные системы из совершенно разных областей, которые, тем не менее, описываются одинаковыми уравнениями и потому демонстрируют очень схожую динамику.
Первая система — чисто физическая: бусинка массы \(m\) нанизана на проволоку и удерживается пружиной (рис 1., интерактивная версия чертежа доступна здесь). Основание пружины находится на расстоянии \(a\) от проволоки, ее жесткость равна \(k\), а длина в ненатянутом состоянии — \(L_0\). Проволока натянута под углом \(\theta\) к горизонтали. Какие точки равновесия есть у бусинки в этой ситуации? Как их наличие и положение зависит от безразмерных параметров \(\theta\) и \(a/L_0\)?

Вторая система — это модель из популяционной динамики. Канадские хвойные леса страдают от паразитов — бабочек листоверток, относящихся к роду Choristoneura. Их гусеницы поедают молодые побеги (а если гусениц совсем много, то и старые тоже). Деревья вполне могут пережить год-два их нашествия, но если гусеницы будут поедать хвою в течение нескольких лет, то деревья гибнут.
Нам нужно построить модель роста популяции почковых червей при двух условиях: 1) наличие птиц, которые питаются гусеницами и контролируют их численность, и 2) медленное увеличение площади леса. Для простоты предположите, что при отсутствии птиц численность гусениц увеличивается по логистическому закону (ограниченному лишь площадью леса). Взаимодействие птиц с гусеницами предполагается чуть более сложным: пока гусениц мало (скажем, меньше какого-то числа \(N_0\)), птицы ими мало интересуются. Если же гусениц много (много больше \(N_0\)), то охота на них идет в полном объеме, ограниченном лишь постоянным числом хищников. Какие равновесия существуют в этой ситуации для численности гусениц при различных параметрах (темпе увеличения площади леса, критическом числе \(N_0\))?
Подсказка 1
Начните с рассмотрения первой системы при \(\theta=0\). Какие равновесия существуют при \(a>L_0\) и \(a<L_0\)?
Подсказка 2
Можно считать, что численность гусениц под влиянием птиц меняется по закону \(\dot{N} = -H N^2 / (N_0^2 + N^2)\), где \(H\) — это некоторое число, пропорциональное количеству птиц и эффективности их охоты (размножение гусениц-бабочек здесь не учитывается, конечно).
Решение
Разберемся с динамикой первой системы для \(\theta=0\). Возможны два случая. При \(L_0 > a\) (рис. 2) в равновесии пружинка обязана находиться в ненатянутом состоянии, иначе на бусинку будет действовать нескомпенсированная горизонтальная сила. Вертикальные силы (сила реакции и вес) при этом компенсируют друг друга. Положение равновесия \(x_1\) легко найти по теореме Пифагора: \(x_1=\sqrt{L_0^2-a^2}\). Интуитивно ясно, что это положение равновесия — устойчивое: если сдвинуть бусинку слегка влево или вправо, то пружинка будет тянуть в противоположном от смещения направлении. Соответственно, при \(L_0 > a\) (и \(\theta=0\)) есть две точки устойчивого равновесия (по обе стороны от середины проволоки).

Рис. 2.
Если же \(L_0 < a\), то очевидно, что равновесие возможно лишь при \(x=0\) (рис. 3), так как в противном случае пружинка будет давать горизонтальную компоненту силы, которую нечем скомпенсировать.

Рис. 3.
Теперь, зная положения равновесия, посмотрим на эту систему в динамике: начнем с ситуации, когда горизонтальная проволока находится очень далеко от основания пружинки (то есть \(a\gg L_0\)), и будем медленно сдвигать ее вниз, уменьшая \(a/L_0\), но не наклоняя при этом проволоку. Положения равновесия в зависимости от \(a/L_0\) изображены на рис. 4 оранжевой линией. Как мы показали выше, при \(a>L_0\) — одно равновесие в точке \(x=0\) (вертикальный луч). При \(a/L_0 < 1\) происходит то, что называется бифуркацией (в данном случае это так называемая вилообразная бифуркация): положений равновесия становится два. Таким образом, при критическом значении \(a/L_0\) поведение системы качественно меняется.

Рис. 4.
При добавлении еще одного параметра — угла наклона проволоки \(\theta\) — картина становится еще интереснее. При малых значениях \(\theta\), очевидно, у системы остаются все те же положения равновесия (одно — при \(a > L_0\), и два — при \(a < L_0\)), они показаны на рис. 5 и 6.

Рис. 5. Единственное положение равновесия при малом \(\theta\) и \(a>L_0\)
Если \(a<L_0\), то, расписав равенство сил, можно найти две точки равновесия: в обоих случаях сила натяжение пружинки \(k\Delta L\) (точнее ее компонента вдоль проволоки) компенсируется силой тяжести (ее проекцией на направление проволоки). Легко видеть, что \(\Delta L=\sqrt{x^2+a^2}-L_0\). Равенство компонент сил в направлении вдоль проволоки запишется так:
\[k\Delta L\frac{x}{\sqrt{x^2+a^2}}=mg\sin{\theta},\]или, если упростить и подставить \(\Delta L\):
\[\tilde{x}\left(1-\frac{L_0/a}{\sqrt{\tilde{x}^2+1}}\right)=\frac{mg}{ak}\sin{\theta},\]где \(\tilde{x} = x/a\) (то есть расстояние измеряется в «единицах» \(a\)). Прежде всего заметим, что ровно это же уравнение можно написать и для случая \(a>L_0\), но в таком случае (можно строго это показать) оно будет иметь лишь одно решение (при малых \(\theta\)).

Рис. 6. Два положения равновесия при малом \(\theta\) и \(a<L_0\)
Чтобы понять лучше динамику системы и поведение точек равновесия, давайте графически найдем решения этого уравнения. Для этого построим левую и правую части равенства на одном графике, и посмотрим при каких значениях \(\tilde{x}\) они пересекаются в зависимости от параметров \(a/L_0\) и \(\theta\) (рис. 7, также доступна интерактивная версия). При большом \(a/L_0\) существует лишь решение одно при положительном \(x\) (смещение вниз — и пружинка окажется в растянутом состоянии) для произвольного значения угла наклона.
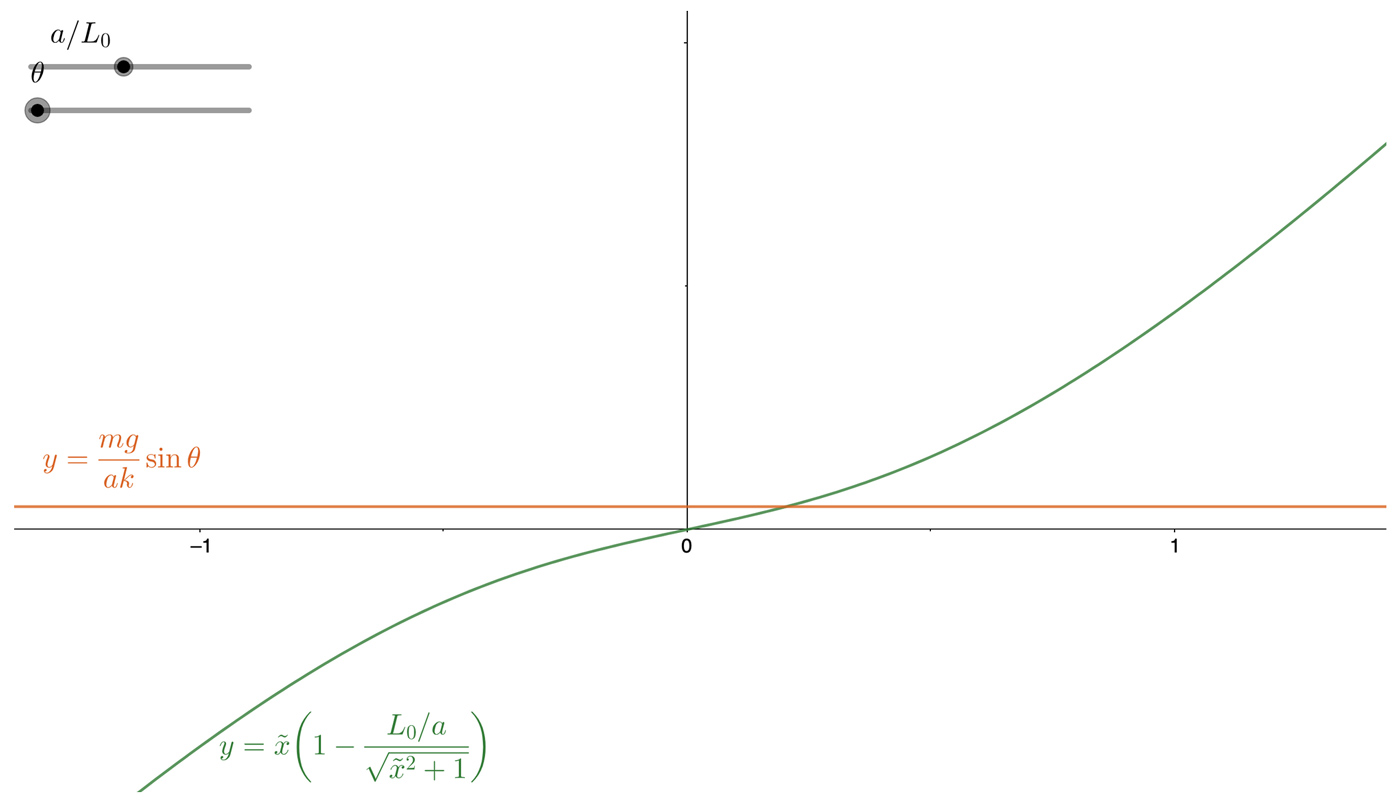
Рис. 7.
Картина, однако, качественно меняется при \(a/L_0 < 1\) (рис. 8). При достаточно малых значениях \(\theta\) есть три пересечения: среднее соответствует точке неустойчивого равновесия (подумайте, почему), тогда как левое и правое являются точками устойчивого равновесия, которые мы находили ранее (для \(\theta =0\)).

Рис. 8.
Заметьте, что левая точка равновесия исчезает при достаточно больших значениях угла наклона \(\theta\). Поведение системы при этом меняется скачкообразно: если бусинка находилась в левой точке равновесия, то при увеличении угла наклона больше критического значения она неминуемо упадет в нижнюю точку равновесия (так как верхняя точка просто исчезнет). Такую ситуацию в математике и физике называют катастрофой.
Точки равновесия при различных углах \(\theta\) и значениях параметра \(a/L_0\) показаны на рис. 9 (пунктиром показаны точки неустойчивого равновесия). Случай \(\theta = 0^\circ\) мы уже рассматривали выше. Для произвольного же значения угла существует некоторое критическое значение параметра \(a/L_0\), при котором левая точка равновесия пропадает, и система обязана катастрофически «свалиться» в новую точку равновесия (которая находится справа).

Рис. 9.
Вооружившись опытом в динамике такого рода процессов, обратимся теперь ко второй задаче. Она подробно рассмотрена в статье D. Ludwig et al., 1978. Qualitative Analysis of Insect Outbreak Systems: The Spruce Budworm and Forest. Нетрудно написать уравнение зависимости численности популяции листоверток от времени:
\[\dot{N} = R N\left(1-\frac{N}{K}\right)-\frac{HN^2}{N^2+N_0^2},\]где \(N\) — численность гусениц, \(R\) и \(H\) — темпы ее увеличения и сокращения (из-за охоты птиц), \(K\) — это максимальное число гусениц, которое теоретически может поместиться в лесу (это число пропорционально площади леса), а \(N_0\) — критическое значение (если численность гусениц выше него, то птицы начинают ими интересоваться).
Для простоты перепишем это уравнение в безразмерном виде. Обозначим \(n=N / N_0\), \(k = K/N_0\), \(r = R N_0 / H\) и будем измерять время в единицах \(\tau = H t / N_0\). Тогда наше уравнение перепишется в упрощенном виде, в котором всего два параметра — как и в предыдущей задаче (\(r\) и \(k\)):
\[\dot{n}=rn\left(1-\frac{n}{k}\right)-\frac{n^2}{1+n^2}.\]Давайте сперва интуитивно поймем, какой смысл у каждой из безразмерных переменных. Если число \(n\), характеризующее численность популяции, много больше 1, то птицы активно охотятся на листоверток, и их популяция может быть ограничена именно темпом охоты. Если же \(n\ll 1\), то популяция листоверток ограничена лишь размером леса, то есть параметром \(k\): если \(n \ll k\) (и \(n\ll 1\)) листовертки экспоненциально размножаются. Число \(r\) параметризует скорость этого экспоненциального роста (с учетом и охоты и размножения).
Очевидно, что система будет стремиться к некоторому равновесию (как и в предыдущей задаче), то есть к ситуации, когда \(\dot{n} = 0\). Чтобы найти эти точки равновесия для произвольных значений \(r\) и \(k\), достаточно нарисовать на одном графике линии \(r(1-n/k)\) и \(n/(1+n^2)\) (\(n = 0\) нас, очевидно, не интересует). На рис. 10 показано положение прямой \(r(1-n/k)\) для пяти разных значений \(r\) при \(k=5\) (интерактивная версия этого графика доступна здесь).

Рис. 10.
Что мы видим? При произвольном значении \(r\), то есть при произвольном балансе между размножением и охотой, у системы существует некоторая точка равновесия. Причем, очевидно, что чем эффективнее охота в сравнении с темпом размножения (то есть чем ниже \(r\)) — тем меньше равновесная популяция гусениц.
Пока ничего особенно в наших заключениях нет. Давайте теперь посмотрим, что будет, если при каком-то фиксированном значении \(r\) увеличивается размер леса \(k\) (что вполне естественно, так как сезонность охоты и размножения гораздо короче, чем характерное время роста леса). На рис. 11 показаны точки равновесия (включая неустойчивые — белые кружочки) при различных значениях \(k\). При малых значениях \(k\) численность равновесной популяции фактически не меняется и находится на некотором уровне \(n< 1\). Однако при некотором критическом размере леса \(k>k_0\) появляется вторая точка устойчивого равновесия, при которой \(n> 1\)! Иными словами, даже при достаточно эффективном контроле (то есть при малом \(r\)) из-за медленного роста леса по площади на протяжении многих лет может внезапно случиться вспышка популяции паразитов. Этот неожиданный результат очень трудно предвидеть интуитивно, не рассматривая достаточно простую математику этого процесса.

Рис. 11.
Равновесия при различных значениях \(r\) и \(k\) показаны на рис. 12 (пунктиром, опять же, обозначены неустойчивые точки, которые нам не так интересны). Представьте ситуацию, когда \(r = 0{,}25\) и популяция контролируется примерно на уровне \(n = N/N_0\approx 0{,}2\). При медленном естественном увеличении площади леса (росте \(k\)) сперва практически ничего не меняется — популяция держится примерно постоянной на уровне \(N\approx 0{,}2 N_0\). Однако в какой-то момент, когда \(k\gtrsim 16\) у системы появляется новая точка устойчивого равновесия (при \(N\sim 8N_0\))! Это не значит, что популяция обязана скачкообразно вырасти с \(N\sim 0{,}2N_0\) до \(N\sim 8N_0\) (в конце концов, левая точка равновесия все еще таковой является). Однако, если плохо контролировать популяцию листоверток теперь, то малейшие флуктуации в значении \(N\) могут привести к катастрофическому росту популяции (что не было возможно, когда параметр \(k\) был достаточно малым).

Рис. 12.
Послесловие
Как уже говорилось в решении, поведение динамических систем, когда при медленном и непрерывном изменении параметров качественное поведение системы меняется скачкообразно, называют бифуркацией. Именно феноменология бифуркаций лежит в основе простейших математических моделей, описывающих катастрофы. Интерпретация уравнений при этом может быть совершенно разнообразная. Скажем, во второй задаче мы могли рассматривать не популяцию гусениц в хвойном лесу, а, например, стоимость акций некоторой компании на рынке, общий объем которого характеризуется некоторым числом \(k\), а потенциальный рост стоимости компании характеризуется числом \(r\). Тогда при медленном росте общего объема рынка равновесная стоимость компании, которая диктуется сложными взаимодействиями внутри рынка, может внезапно подскочить в несколько раз, приведя к абсолютно непредсказуемым и катастрофическим последствиям.
Стоит, конечно же, иметь в виду, что в реальном мире такой упрощенный анализ не всегда правильный. Скажем, в примере про стоимость акций на рынке, если рост компании еще можно иногда описать с помощью логистической кривой, то сложное взаимодействие с конкурентами и остальной частью рынка описать необыкновенно тяжело. Поэтому анализ такого рода — и в инженерии, и в физике, и в финансах, и в других областях науки — имеет, скорее, роль первой ступени в исследовании поведения той или иной системы. Такой анализ дает качественное понимание того, где система может «дать сбой», при каких критических параметрах она наиболее уязвима, и что стоит предпринять, чтобы этого не допустить.
Идеи для задач заимствованы из книги Стивена Строгаца «Нелинейная динамика и хаос».



Рис. 1.