Потеря управляемости
Анатолий Минеев
«Квант» №7, 2018
Приведем несколько известных житейских примеров, относящихся к постепенной, а также к внезапной потере управляемости. И расскажем о том, как вести себя в таких случаях, иначе говоря — о том, как при этом меняются алгоритмы управления.
Ахиллес и черепаха

Начнем с хрестоматийного примера, когда быстроногий Ахиллес гонится за черепахой (рис. 1). Зеноном выделены реперные точки, относящиеся к положению черепахи в моменты «сверки часов», в каждый из которых Ахиллес собирался обнаружить черепаху. Но, добежав до нужного места, он обнаруживает, что черепаха уже сместилась вперед... Далее цикл в рамках чистой математики и бесконечно делимых пространства и времени может быть повторен до бесконечности с выводом — черепаху Ахиллесу не догнать.
Если не заморачиваться указанным дроблением дистанции и выделением реперных точек и позволить Ахиллесу бежать свободно, не следя за черепахой, то никаких проблем не возникает и время, через которое Ахиллес и черепаха поравняются, очевидно, составит
Здесь L — первоначальное расстояние между Ахиллесом и черепахой, а vA и vч — их скорости. При этом до встречи черепаха успеет проползти расстояние Lvч / (vA − vч), а Ахиллес — пробежать расстояние LvA / (vA − vч). Так что если скорость Ахиллеса, например, в 10 раз больше скорости черепахи, то до встречи они преодолеют расстояния (10/9)L и (1/9)L соответственно.
Выделение для Ахиллеса реперных точек пространства, в которых движущаяся черепаха располагалась в предыдущие моменты времени, похоже на построение дискретной схемы решения задачи. А с другой стороны — на работу алгоритмов управления: если поставлена цель достичь некоторой точки, то, когда Ахиллес достигает ее, черепаха уже сместилась, теперь ставится следующая цель и т.д. Если у системы управления при этом конечное время срабатывания на каждом шаге, то процесс может сильно затянуться. Поэтому задачу об Ахиллесе и черепахе можно рассматривать и в качестве намека на постепенную потерю управляемости.
Чуть подробнее постепенную потерю управляемости поясним на втором, не менее известном примере причаливания судов к пристани.
Причаливание
В этом примере, взятом из книги В. И. Арнольда «Математическое понимание природы» (М.: МЦМНО, 2010), в качестве Зенона фигурирует почти столь же легендарный Владимир Игоревич Арнольд, в качестве Ахиллеса — корабль, а в качестве черепахи — пристань.
Смысл проблемы в том, что по мере приближения корабля к берегу его скорость (регулируемая с помощью двигателя и руля) должна снижаться, а в момент касания пристани — уменьшиться до нуля, чтобы не было удара. Простейшее уравнение, описывающее такой процесс, имеет вид
а его решение —
где x — расстояние от корабля до пристани. Формально из решения следует, что процесс причаливания занимает бесконечное время: расстояние до пристани хоть и спадает по экспоненте, но в любой момент времени не нулевое, а значит, корабль никогда не причалит к пристани. Ситуация почти как у Ахиллеса и черепахи.
Если опять рассматривать этот пример в качестве задачи управления, отслеживать изменение расстояния до причала во времени и давать команды кораблю на изменение скорости, то интервал между сигналами управления должен постоянно уменьшаться. Нужно будет все быстрее принимать решения по управлению рулем и двигателем, что непросто при больших размерах и весе корабля... Опять складывается ситуация постепенной потери управляемости. Что делать?

Рис. 2. Причаливание корабля. Внизу изображен кнехт с намотанным на него канатом
Переход к новому алгоритму управления изложен в упомянутой книге: матрос бросает канат с корабля на пристань, сам прыгает на берег, наматывает канат на кнехт и вручную притягивает судно (рис. 2). Корабль, немного «потрепыхавшись», застывает у пирса. Таким образом, окончание процесса причаливания происходит несколько грубовато, неожиданно, но эффективно.
В книге приведен и другой похожий пример — прилунение ракеты. Та же ситуация: в конце прилунения ракета несколько раз подпрыгивает на рессорах, ударяясь о поверхность Луны, пока колебания постепенно не затухнут.
И в этих случаях при потере управляемости необходим переход к новому алгоритму поведения. Так, в примере с причаливанием управляемость теряется постепенно, что дает возможность матросу успеть перебраться на берег и выполнить ряд стандартных операций.
Однако бывают ситуации, когда потеря управляемости происходит внезапно и нужно практически мгновенно переключаться на другой алгоритм. Рассмотрим пару примеров такого типа.
Падение при ходьбе
Следующий пример, выведенный в заголовок, знаком большинству пешеходов. Начнем с обычной, нормальной ходьбы (рис. 3). Такая размеренная ходьба уже представляет собой управляемую последовательность падений. Ее даже называют иначе чередой рефлекторно контролируемых падений.
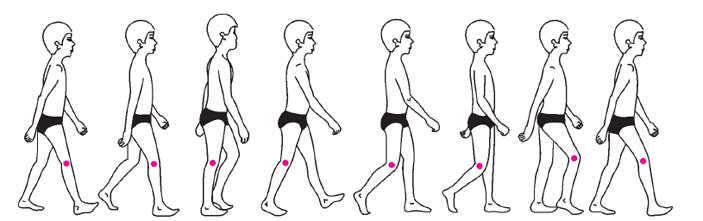
Рис. 3. Последовательность движений при ходьбе
В начале шага человек, стоя на одной ноге, наклоняется вперед и начинает падать. В ходе падения вытянутая вперед нога касается земли, и по инерции движения на нее переносится вес тела. Колено, амортизируя падение, подгибается, затем выпрямляется и процесс повторяется. Такая нормальная ходьба в ходе ежедневных упражнений доведена до автоматизма, и работа системы управления положением во время ходьбы происходит рефлекторно. При этом одновременно решается целый комплекс задач: плавность ходьбы, сохранение походки, минимальный расход энергии. Мышцы напрягаются и расслабляются в нужной последовательности.
Но вот неожиданное препятствие — человек споткнулся, внезапно ощутил начало падения и понял, что его рефлекторно уже не остановить. Время падения Δtп легко оценить. Если высота центра тяжести человека равна H, то из известного соотношения \( H = gΔt^2_п / 2 \) при Н = 0,6–1 м следует, что Δtп = 0,35–0,45 с, т.е. на «разруливание ситуации» есть менее полсекунды. Скорость при падении на землю может достичь vп = gΔtп ∼ 4 м/с .
Что можно и нужно успеть сделать? Приведем простейшие советы по «управлению» в ходе падения:
- Присесть! Снижение высоты падения уменьшает скорость приземления и соответствующие последствия.
- Группировка! Уподобившись «колобку», вы при падении просто перекатитесь, что менее травматично.
- Наибольшее внимание — «слабым местам»: позвоночнику и голове! Успеть упасть на бок, прижав подбородок к груди. Руки к туловищу, зубы стиснуты, глаза следят за процессом падения.
Реально ли все это успеть сообразить и исполнить за полсекунды? Реально, если у вас накоплен навык и выработан соответствующий рефлекс поведения при падении. Поэтому спортсменов, например, специально учат правильно падать.
Аквапланирование
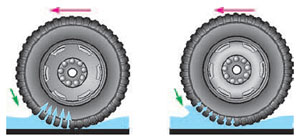
Рис. 4. Слева — скорость меньше критической, колесо контактирует с покрытием дороги; справа — скорость больше критической, колесо «всплыло» над дорогой, начинается аквапланирование
Наконец, еще один пример, который знаком многим автомобилистам, — аквапланирование (рис. 4). Под аквапланированием понимают полную или частичную внезапную потерю сцепления из-за присутствия воды между полотном дороги и колесом. Подобное бывает при движении автомобиля на большой скорости после ливня, при наличии больших луж на дороге или в колее, при таянии снега и тому подобное.
При достаточно большой скорости движения по мокрой дороге возможна ситуация, когда колесо не успевает отводить воду из пятна контакта с дорогой. Колеса приподнимаются над дорогой, между ними образуется водная подушка, и сцепление колес автомобиля с покрытием дороги резко уменьшается. Чем это опасно?
Уменьшение сцепления с дорогой ведет к росту тормозного пути. При торможении на автомобиль действует сила трения, равная Fтр = μmg. Поэтому из уравнения движения ma = Fтр следует, что тормозной путь равен
Здесь v0 — начальная скорость автомобиля, μ — коэффициент трения, или иначе индекс трения, g — ускорение свободного падения. Если к тормозному пути добавить расстояние, пройденное автомобилем до начала торможения, и принять, что время реакции водителя равно Δtp, то суммарный путь составит
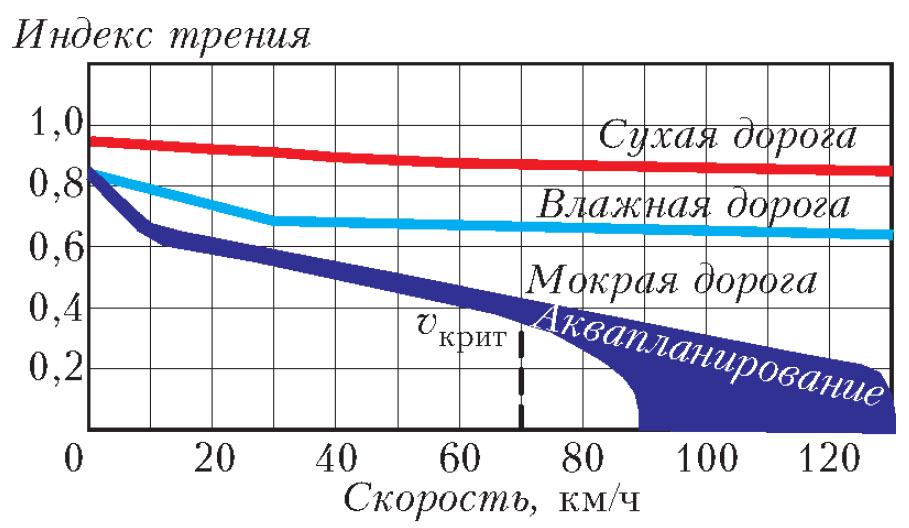
Рис. 5. Зависимость индекса (коэффициента) трения от скорости и состояния дороги
Приведем оценки, использовав рисунок 5, на котором приведена зависимость индекса трения от скорости и состояния дороги. Примем для примера, что начальная скорость автомобиля 72 км/ч, т.е. 20 м/с, а время реакции водителя 0,5–1 с. В этом случае длина торможения составит 30–40 м на сухой дороге (μ = 0,9), 40–50 м на влажной дороге (μ = 0,7) и 60–70 м на мокрой дороге (μ = 0,4, до перехода в режим аквапланирования).
При вдвое меньшей скорости — 36 км/ч, или 10 м/с — и том же значении времени реакции водителя длина торможения гораздо меньше: 10–15 м на сухой дороге (μ = 0,9), 12–17 м на влажной дороге (μ = 0,7) и 16–21 м на мокрой дороге (μ = 0,45).
Отметим, что при торможении на льду (μ ∼ 0,2) мы приходим к длине торможения s ∼ 30–35 м при v0 = 10 м/с и s ∼ 110–120 м при v0 = 20 м/с. А в режиме аквапланирования индекс трения может быть еще меньше, чем на льду, и тормозной путь катастрофически удлиняется.
Но это еще не все неприятности. При аквапланировании резко сужаются возможности управления автомобилем: колесо скользит по водной пленке, машина не слушается руля. Более того, попытка судорожно вывернуть руль может привести к тяжелым последствиям: когда машина выскочит за пределы лужи и вернется к управляемому режиму, ее занесет.
Физика процесса перехода в режим аквапланирования подробно разобрана в «Занимательной физике» С. Д. Варламова (сайт СУНЦ МГУ). В статье «Аквапланирование» приведены простые соотношения, из которых можно понять зависимость скорости перехода к аквапланированию vа от основных параметров задачи и получить верную оценку этой скорости. Приведем некоторые результаты этой работы.
Если перейти в систему координат, в которой колесо неподвижно, а скорость «набегающей» водной пленки равна v, то давление потока воды составит ρv2 / 2 (ρ — плотность воды). Вода, «набегающая» на колесо и отражающаяся от него, создает подъемную силу, равную произведению давления воды на эффективную площадь колеса S. Для оценки этой площади воспользуемся рисунком 6, где приведено изображение колеса в «фас» и «профиль» (направление потока набегающей воды показано в правой части рисунка красной стрелкой). Для эффективной площади имеем S ∼ Lx. Из прямоугольного треугольника OAB по теореме Пифагора получаем R2 − x2 = (R − h)2. Поскольку h ≪ R, то приближенно можно записать R2 − x2 = R2 − 2hR, или \( x = \sqrt{2hR} \). Отсюда, опуская коэффициенты порядка единицы, для подъемной силы Fп, действующей со стороны воды на колесо автомобиля, получаем
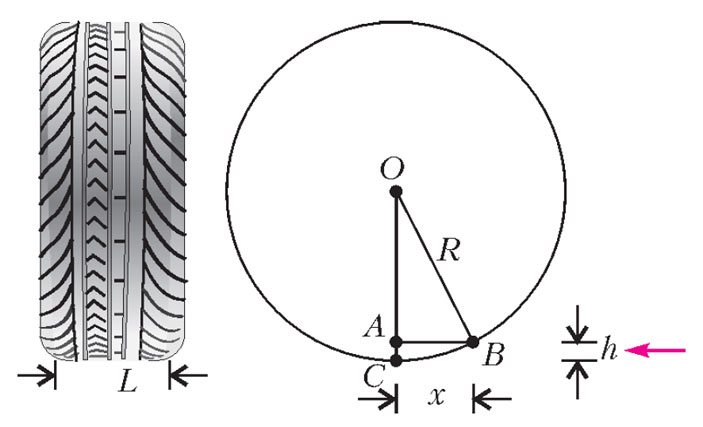
Рис. 6. К расчету эффективной площади колеса при аквапланировании: L — ширина протектора колеса, R — радиус колеса, h — глубина слоя воды между дорогой и колесом
Если приравнять подъемную силу силе тяжести машины, деленной на число колес:
то можно получить условие отрыва колеса от дороги. Для типичных параметров L = 15 см, R = 30 см, h = 1 см, ρ = 1 г/см3, g = 10 м/с2 и при массе автомобиля M = 1000 кг скорость перехода в режим аквапланирования оказывается масштаба
va ∼ 60–70 км/ч.
Из приведенных оценок следует, что проблема аквапланирования более опасна (и, соответственно, скорость перехода в этот режим меньше) в случае легких (легковых) автомобилей (va ∼ M1/2), широких шин (va ∼ L−1/2), глубоких луж (va ∼ h−1/4). Казалось бы, для уменьшения опасности перехода в режим аквапланирования полезно делать шины как можно уже и с глубоким бороздками. Однако в этом случае становится хуже управляемость машины при обычном движении по дороге, а сами шины быстрее изнашиваются. В результате приходится искать компромисс.

Рис. 7. Слева — бороздки и шипы на протекторе шины автомобиля; справа — истечение воды через бороздки на поверхности шины
Борьба с аквапланированием ведется по ряду направлений, основные из которых — подготовка дорог и шин. В частности, дорожное покрытие делают шероховатым, что увеличивает сцепление. Большое внимание обращают на конструкцию и рельеф шин — см. бороздки и шипы на протекторе шин на рисунке 7, слева. Это уменьшает эффективную высоту слоя воды. Более того, бороздки помогают воде вытекать вбок (см. рис. 7, справа). Наличие бороздок и увеличение давления шин снижает эффективную ширину шин.
Но что делать, если аквапланирование уже началось? Многолетний опыт водителей привел к следующему «алгоритму управления», близкому к «замрите в исходном положении»:
- Руль прямо!
- Никаких резких движений!
- Сохраняйте все, как было до начала аквапланирования!
- Потихоньку сбрасывайте скорость!
- После восстановления сцепления колес с покрытием дороги постепенно выравнивайте автомобиль...
Автор выражает глубокую благодарность А. С. Харину и О. А. Гусеву за полезные обсуждения.














Рис. 1. Бег Ахиллеса за черепахой. Выделены первые реперные точки положения Ахиллеса (А) и черепахи (ч)